Hocheffizienter und präziser Gelenkroboter
1. Ausgestattet mit Hochleistungs-Servomotoren und fortschrittlichen Übertragungssystemen kann jedes Gelenk schnell auf Anweisungen reagieren und eine Hochgeschwindigkeitsbewegung und -bedienung erreichen.
2. Durch den Einsatz hochpräziser Reduzierstücke, Encoder und fortschrittlicher Bewegungssteuerungsalgorithmen sind die Wiederholbarkeit und absolute Positionierungsgenauigkeit sehr hoch.
3. Das Mehrgelenk-Design bietet mehrere Freiheitsgrade und kann komplexe Bewegungen und Pfadplanungen im dreidimensionalen Raum ausführen.
4. Ausgestattet mit einer benutzerfreundlichen Programmierschnittstelle und Offline-Programmiersoftware können Bediener durch einfache Schulung Programmiermethoden schnell erlernen.
5. Je nach Anwendungsanforderungen können Endeffektoren unterschiedlicher Belastungsstufen so konfiguriert werden, dass sie größeren Belastungen standhalten.
Jedes Gelenk besteht normalerweise aus mehreren Gelenken und verfügt über einen bestimmten Freiheitsgrad, der eine flexible Bewegung ermöglichen kann. Bei den üblichen vier- oder sechsachsigen Robotern beispielsweise arbeitet jedes Gelenk zusammen, um dem Roboter die Ausführung komplexer Bewegungen im dreidimensionalen Raum zu ermöglichen.

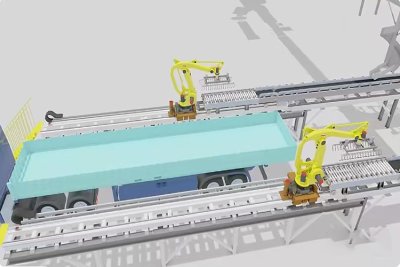
Der Arm verbindet die Gelenke und den Endeffektor, hat eine bestimmte Länge und Tragfähigkeit und kann je nach Arbeitsanforderung gestaltet werden. Es gibt verschiedene Arten von Endeffektoren, wie Greifer, Saugnäpfe, Schweißpistolen usw., mit denen bestimmte Aufgaben wie Greifen, Handhaben, Schweißen usw. ausgeführt werden.

Der Rumpf ist das Hauptgerüst des Roboters, dient als Stütz- und Installationsgrundlage für verschiedene Komponenten und muss über ausreichende Festigkeit und Stabilität verfügen. Die Basis dient zur Fixierung des Roboters, um sicherzustellen, dass er während des Betriebs nicht wackelt oder sich bewegt.

Echtzeit-Dateninteraktion mit mehreren Sensoren, wie Positionssensoren, Kraftsensoren, Vision-Sensoren usw. Durch die von den Sensoren zurückgemeldeten Informationen kann die Steuerung den Bewegungszustand des Roboters in Echtzeit anpassen, um sicherzustellen, dass er die Aufgabe genau erledigt und verbessert die Sicherheit und Zuverlässigkeit der Arbeit.

Die Bewegungsgeschwindigkeit von Gelenken liegt im Allgemeinen zwischen mehreren zehn und hundert Umdrehungen pro Sekunde. Die Gesamtbewegungsgeschwindigkeit des Roboters hängt von der koordinierten Bewegung jedes Gelenks und der Komplexität der Arbeitsaufgabe ab.