
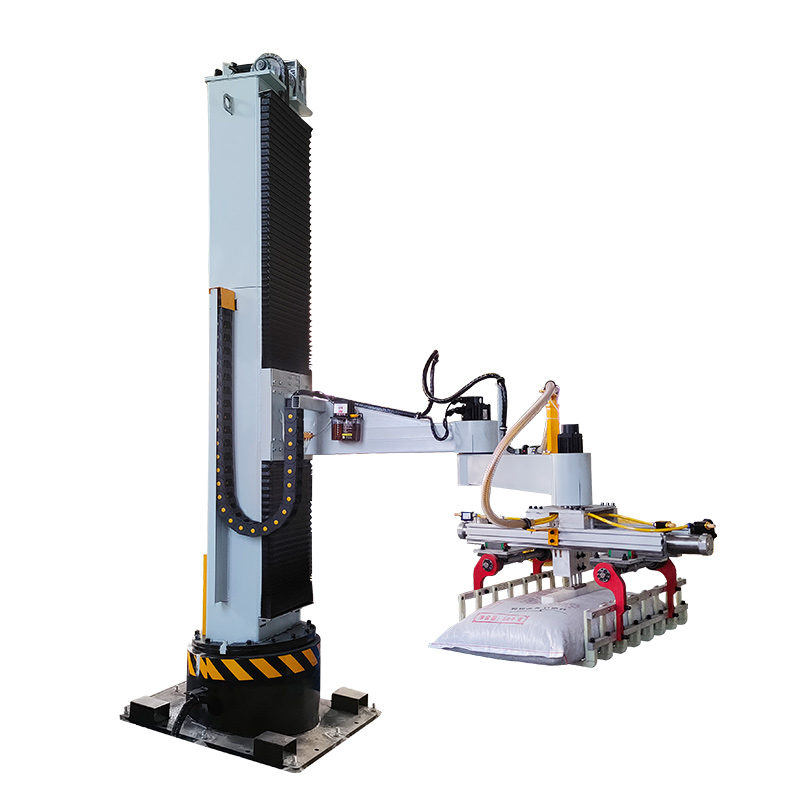

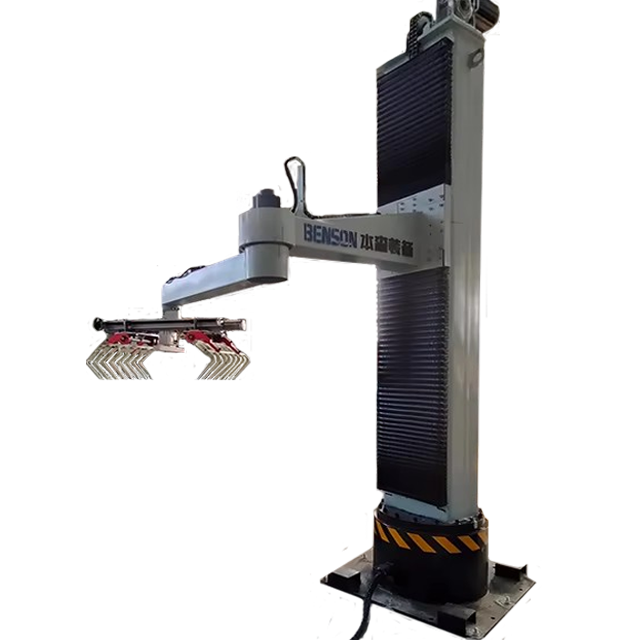

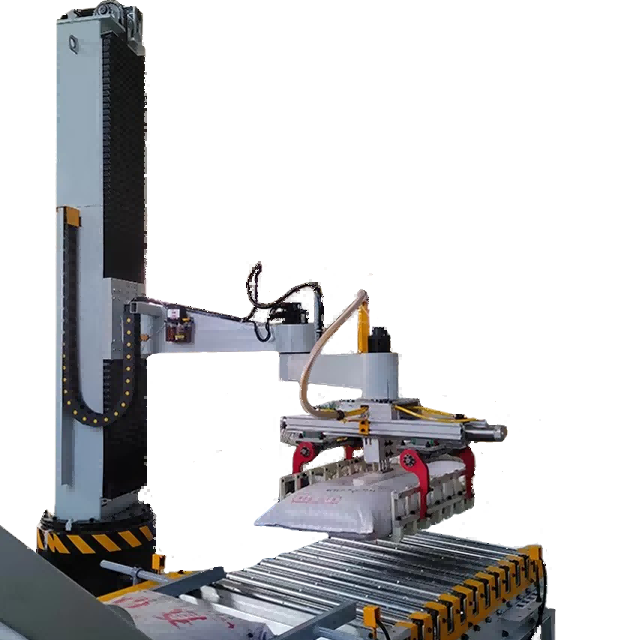
Automatischer Säulenroboter
1. Das Säulendesign ist kompakter, wodurch der vertikale Raum effektiv genutzt und die Bodenfläche reduziert werden kann.
2. Es kann flexibel auf verschiedenen Produktionslinien konfiguriert werden und ist einfacher mit der Anordnung der Peripheriegeräte zu koordinieren.
3. Durch hochpräzise Servomotoren, fortschrittliche Steuerungssysteme und präzise mechanische Strukturen können eine präzise Positionierung und Bedienung erreicht und Materialien genau erfasst und platziert werden.
4. Die hochfeste und steife mechanische Struktur hält großen Belastungen und Drücken stand und bleibt im Langzeitbetrieb stabil.
5. Entwickelt für Industrieumgebungen, kann es unter rauen Arbeitsbedingungen wie Staub, Feuchtigkeit und hohen Temperaturen stabil arbeiten und sich an die Produktionsumgebung verschiedener Branchen anpassen.
6. Normalerweise als Teil einer vollautomatischen Produktionslinie, kann es nahtlos mit anderen Geräten wie Verpackungsmaschinen, Förderbändern und Lagersystemen verbunden werden.
Es besteht normalerweise aus vertikalen Säulen, Armen, Manipulatoren und Ladungsklammern. Die vertikalen Säulen sorgen für Halt und Stabilität für den Roboter, die Arme verbinden die Säulen und Manipulatoren, um es den Manipulatoren zu ermöglichen, sich in verschiedene Positionen zu bewegen, und die Manipulatoren und Ladungsklammern werden zum Greifen und Platzieren von Objekten verwendet.

Das Steuerungssystem ist dafür verantwortlich, den Roboter anzuweisen, verschiedene Aktionen auszuführen. Durch voreingestellte Programme oder Echtzeitanweisungen wird eine präzise Steuerung jeder Achse des Roboters erreicht, um die Genauigkeit und Stabilität des Vorgangs sicherzustellen.

Das Antriebssystem nutzt im Allgemeinen Servomotoren als Antriebsquelle, um die Bewegung des Roboters mit Strom zu versorgen. Es bietet die Vorteile einer schnellen Reaktionsgeschwindigkeit, einer hohen Steuerungsgenauigkeit und eines reibungslosen Betriebs, sodass der Roboter Aktionen wie Greifen und Tragen präzise ausführen kann.

Normalerweise gibt es 4 Freiheitsgrade, wie S-Achse, Z-Achse, R-Achse, T-Achse usw. Jede Achse kann Bewegungen in verschiedene Richtungen ausführen, sodass der Roboter flexibel im Raum agieren kann.

Die maximale Belastung liegt im Allgemeinen bei etwa 100 kg. Roboter mit unterschiedlichen Tragfähigkeiten können je nach tatsächlichem Bedarf ausgewählt werden, um den Anforderungen beim Tragen von Gegenständen unterschiedlichen Gewichts gerecht zu werden.

Der maximale Bewegungsradius kann etwa 1950 mm erreichen, was den Arbeitsbereich und den Arbeitsbereich des Roboters bestimmt. Die Wiederholpositionierungsgenauigkeit kann ±0,3 mm erreichen und gewährleistet so die Genauigkeit und Konsistenz des Roboterbetriebs.




