
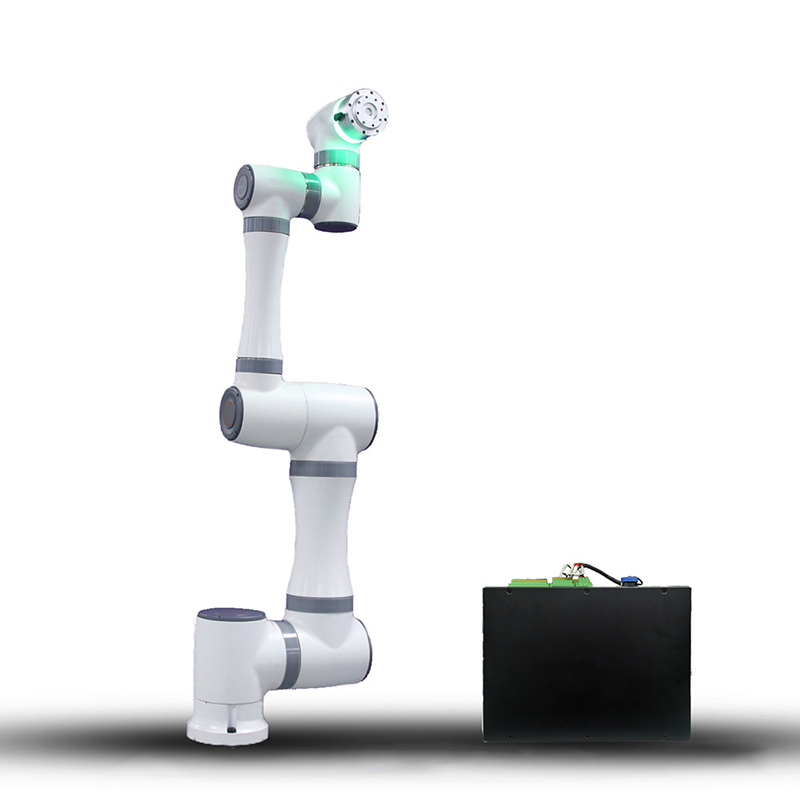



Intelligenter kollaborativer Roboterarm
1. Ausgestattet mit hochpräzisen Kraftsensoren kann es die Kontaktkraft mit dem menschlichen Körper oder anderen Objekten in Echtzeit erfassen. .
2. Die Oberfläche des Roboterarms ist glatt, ohne scharfe Kanten und Lücken, und die Gelenke sind abgerundet, um das Risiko zu verringern, dass der Bediener bei Kontakt eingeklemmt oder zerkratzt wird.
3. Es verfügt normalerweise über mehrere Freiheitsgrade, kann komplexe und unterschiedliche Bewegungsbahnen im dreidimensionalen Raum erreichen und flexibel verschiedene Positionen und Winkel erreichen.
4. Es verwendet leichte Materialien und ein kompaktes Design, hat ein geringes Gewicht und ist leicht zu bewegen und zu installieren. Es kann schnell in verschiedenen Arbeitsszenarien eingesetzt werden.
5. Unterstützt den Lehrprogrammiermodus. Der Bediener kann den Roboterarm manuell in die Zielposition und -haltung ziehen, die Bewegungsbahn und Aktionsparameter aufzeichnen und der Roboterarm kann den Operationsprozess automatisch reproduzieren.
Der intelligente kollaborative Roboterarm ist eine innovative Industrieausrüstung, die fortschrittliche Technologie der künstlichen Intelligenz, präzises mechanisches Design, multimodale Sensorik und effiziente Mensch-Computer-Interaktionsfunktionen integriert.

Der Roboterarm besteht aus leichten und starken Materialien wie einer hochfesten Aluminiumlegierung oder Kohlefaser und verfügt über eine gute Steifigkeit, während sein Gewicht effektiv kontrolliert wird, wodurch eine schnelle und flexible Bewegungsreaktion ermöglicht wird.

Es ist mit einer Vielzahl schnell austauschbarer Endeffektoren ausgestattet, um sich an verschiedene komplexe Aufgabenszenarien anzupassen. Zum Greifen und Bedienen kleinster Teile ist es mit hochpräzisen pneumatischen Greifern oder elektrischen Greifern ausgestattet, die Greiffinger sind aus Spezial gefertigt flexible Materialien und adaptives Design.

Ein umfassendes und fortschrittliches Sensorsystem ist integriert, um eine wichtige Unterstützung für intelligente Zusammenarbeit und hochpräzisen Betrieb zu bieten. Kraftsensoren sind in den Gelenken und Endeffektoren des Roboterarms weit verbreitet, um die Kraft- und Drehmomentinformationen des Roboterarms während der Bewegung und des Betriebs in Echtzeit zu überwachen.

Mit einem leistungsstarken Mehrachsen-Motion-Controller als Kernstück werden intelligente Steuerungsalgorithmen ausgeführt, die für intelligente Zusammenarbeit und hochpräzisen Betrieb optimiert sind. Gleichzeitig unterstützt das Steuerungssystem eine Vielzahl von Kommunikationsprotokollen und Schnittstellen.

Der Einsatz fortschrittlicher Deep-Learning-Algorithmen und Computer-Vision-Technologie ermöglicht es dem Roboter, komplexe Arbeitsumgebungen und Bedienobjekte intelligent wahrzunehmen und zu verstehen.

Basierend auf Reinforcement-Learning-Algorithmen und maschinellen Lernmodellen kann der Roboterarm autonome Entscheidungen treffen und die optimale Betriebsstrategie in verschiedenen Aufgabenszenarien auswählen.

Es wurde ein fortschrittlicher nachgiebiger Steuerungsalgorithmus entwickelt, der es dem Roboterarm ermöglicht, bei der Interaktion mit der äußeren Umgebung eine ähnliche Nachgiebigkeit und Flexibilität wie ein menschlicher Arm zu zeigen.

Es kann in verschiedenen Produktionsverbindungen verschiedener Branchen eingesetzt werden, beispielsweise in der Elektronikfertigung, im Automobilbau, in der Ausrüstung, in der Lagerlogistik, im Bildungswesen und in der wissenschaftlichen Forschung, und kann an verschiedene Arten von Arbeitsaufgaben und Anforderungen der Produktionsumgebung angepasst werden.




