



Beliebter Kamera-Kollaborationsroboterarm
Mit einem fortschrittlichen Bildverarbeitungssystem und einer präzisen Bewegungssteuerung können Aufgaben schnell und genau erledigt werden, beispielsweise können bei der Teilemontage Teile schnell identifiziert und präzise installiert werden, was die Arbeitszeit erheblich verkürzt. Am Beispiel des kollaborativen Kameraroboters in der Automobilproduktionslinie kann er die Montage von Motorteilen schnell und präzise abschließen und die Produktionseffizienz verbessern.
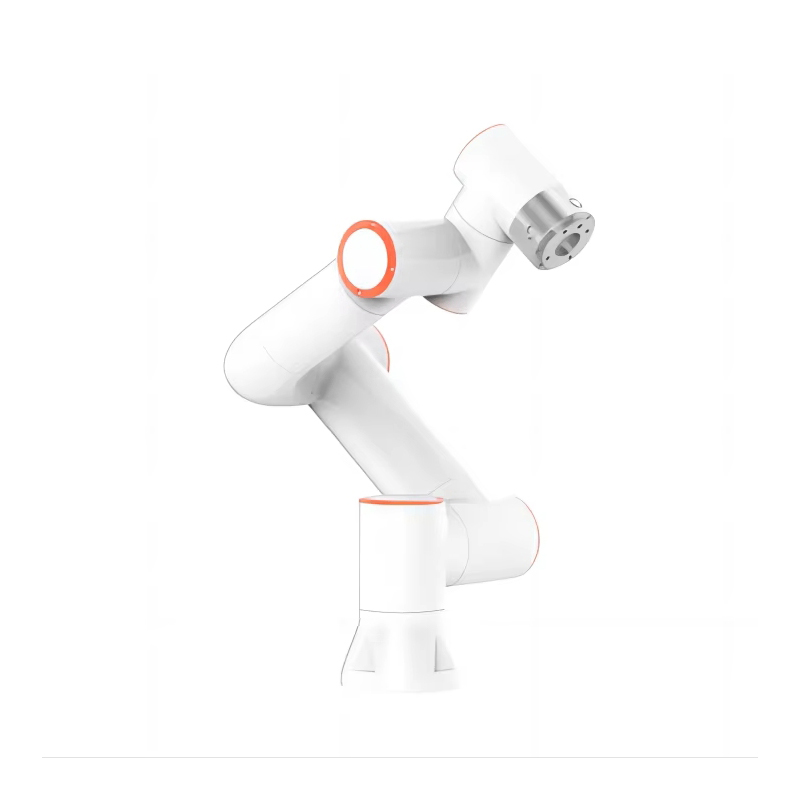
Als Hauptteil der Operation verfügt es über flexible Gelenke und Bewegungsfähigkeiten und kann sich in einem bestimmten Raum frei bewegen, drehen, strecken usw. und verschiedene Aktionsaufgaben wie Greifen, Platzieren, Zusammenbauen usw. präzise ausführen. Unterschiedliche Tragfähigkeiten und Armlängen kooperativer Roboter können sich an unterschiedliche Größen und Arten von Arbeiten anpassen. Beispielsweise können in der Elektronikfertigung Cobots mit kleinen Lasten für die Montage feiner Teile eingesetzt werden; In der Automobilproduktionslinie können große Mengen kollaborativer Roboter die Handhabung und Montage von Karosserieteilen übernehmen.




Parameter des kamerakooperativen Roboterarms
IP-Klassifizierung des Kamera-Kollaborationsroboterarms: LP54 (oder LP66)
Nutzlast des Kamera-Kooperationsroboterarms: 5 kg
Die Reichweite des kollaborativen Roboterarms der Kamera beträgt 922 mm
Das Armgewicht des Kamera-Kollaborationsroboterarms beträgt 23 kg
Das Grundgewicht des Kamera-Kooperationsroboterarms beträgt 30 kg
Eine typische TCP-Rate für einen kamerakollaborativen Roboterarm beträgt 1 ms
Materialien des Kamera-Kooperationsroboterarms: Aluminium, Stahl
Maximale Rotationsgeschwindigkeit des Kamera-Kooperationsroboterarms: ±180
Der Arbeitsbereich des kooperativen Roboterarms der Kamera beträgt ±175 / +851±160/-265