
LKW-Sack-Be- und Entladesystem
Das Be- und Entladesystem für LKW-Säcke ist eines der Online-LKW-Beladesysteme mit Roboterarm. Anwendbare Branchen:
1. Zement/Baumaterialien: 50 kg Zementsäcke, Großlast-6-Achsen-Roboter + Vakuumsauger, 600-2000 Säcke/Stunde
2. Dünger/Futter: 25 kg ~ 40 kg Säcke, Mittellastroboter + Greifer
3. Lebensmittel/Getränke/in Kartons, Flaschen: BLMC-Roboter + Greifer
4. Chemikalien-/Kunststoff-/Tonnensäcke, Fässer: Schwerlast-Portalroboter + Schlinge
5. Industrielles LKW-Be- und Entladesystem für Salzsäcke
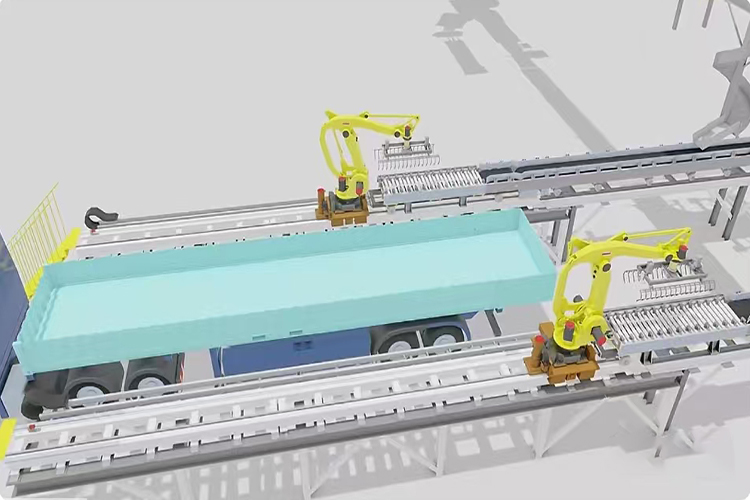
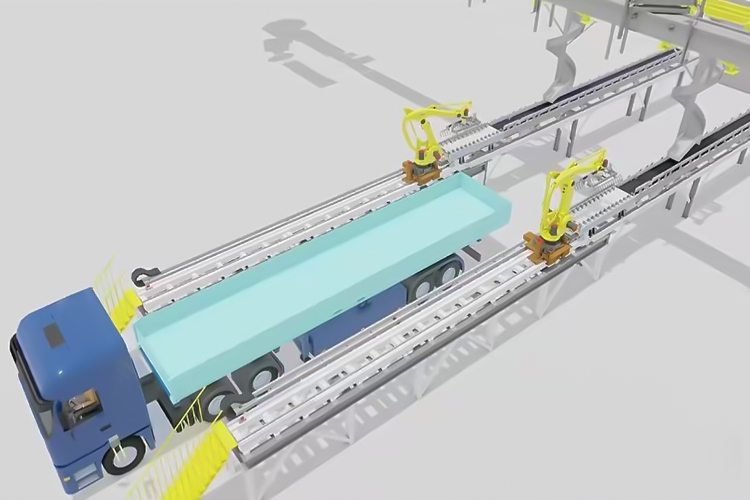
Das Roboterarm-Ladesystem ist eine automatisierte Logistikanlage, die Industrieroboter, intelligente Bildverarbeitung und Fördersysteme nutzt, um effiziente und präzise Ladevorgänge zu ermöglichen. Es wird häufig in Branchen wie der Zement-, Düngemittel-, Futtermittel-, Lebensmittel- und Chemieindustrie eingesetzt und eignet sich besonders für die Verladung von Säcken, Kartons oder normal geformten Gegenständen.
I. Systemzusammensetzung
(1) Roboterarm (Industrieroboter)
Typ: Verwendet meist einen 4-Achsen-Gelenkroboter (z. B. BS-180-3100) (Hochgeschwindigkeits-Leichtlastszenario).
Last: Wählen Sie entsprechend dem Gewicht der Waren aus (Zementsäcke wiegen beispielsweise normalerweise 50 kg pro Sack und es wird ein Roboter mit einer Last von ≥ 120 kg benötigt).
Endeffektor:
Vakuumsaugnapf: geeignet für flach verpackte Materialien (wie Zement, Mehl).
Greifer/Klemme: Wird für verpackte oder unregelmäßig geformte Artikel verwendet.
Magnetische Saugvorrichtung: Szenario Metallverpackung.
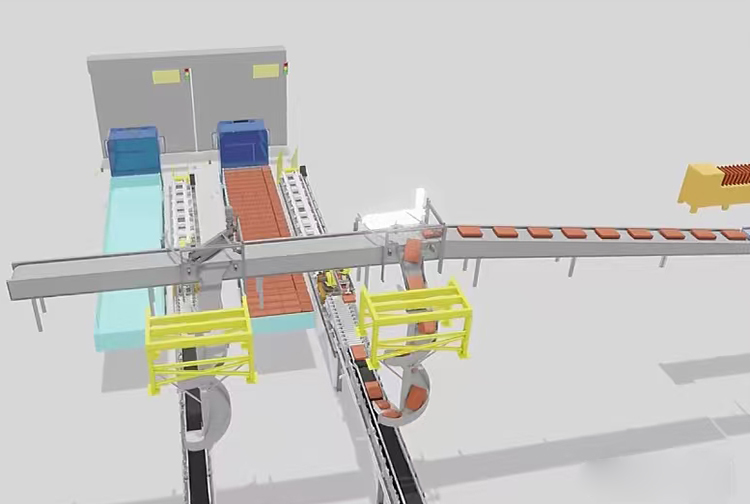
2) Fördersystem
Zuführband: Bandförderer, Rollenbahn oder Kettenförderer, der die Ware in den Arbeitsbereich des Roboterarms transportiert.
Weichen (optional): sortiert mehrere Warenarten.
Wiege-/Inspektionsmodul: Stellt sicher, dass das Gewicht oder Aussehen jedes Frachtstücks qualifiziert ist.
(3) Visuelles Positionierungssystem
3D-Kamera/Laserscanner: Erkennt die Größe des Wagens, den Stapelzustand der Ladung und die Position des Fahrzeugs.
Algorithmus: Generiert den optimalen Stapelpfad durch Punktwolkenanalyse und unterstützt dynamische Anpassungen (wie Fahrzeugbewegungen oder Ladungsversatz).
(4) Steuerungssystem
SPS (Siemens, Mitsubishi): koordiniert Roboterarm, Förderband und Sensor.
Mensch-Maschine-Schnittstelle (HMI): bietet ein Bedienfeld und unterstützt die Umschaltung zwischen manuellem und automatischem Modus.
Daten-Docking: Kann an WMS (Warehouse Management System) oder TMS (Transportation Management System) angebunden werden.
II. Arbeitsablauf
1. Beladen der Fracht: Das Förderband transportiert die Fracht zur Greifstation des Roboterarms.
2. Fahrzeugpositionierung: Das visuelle System scannt die Größe des Wagens und den aktuellen Beladungszustand.
3. Pfadplanung: Das System berechnet die optimale Greif- und Stapelreihenfolge (z. B. versetztes Stapeln, um ein Einstürzen zu verhindern).
4. Greifen und Platzieren: Der Roboterarm führt das Laden gemäß dem geplanten Pfad durch und passt seine Haltung in Echtzeit an.
5. Abschlussrückmeldung: Nach dem Beladen sendet das System ein Signal und das Fahrzeug fährt los.
III. Anwendbare Branchen
1. Zement/Baumaterialien: 50 kg Zementsäcke, Großlast-6-Achsen-Roboter + Vakuumsauger, 600-2000 Säcke/Stunde
2. Dünger/Futter: 25 kg ~ 40 kg Säcke, Mittellastroboter + Greifer
3. Lebensmittel/Getränke/in Kartons, Flaschen: BLMC-Roboter + Greifer |
4. Chemikalien-/Kunststoff-/Tonnensäcke, Fässer: Schwerlast-Portalroboter + Schlinge
5. Industrielles LKW-Be- und Entladesystem für Salzsäcke
IV. Auswahlempfehlungen
Umgebung mit hoher Staubbelastung (z. B. Zementwerke): Wählen Sie einen staubdichten Roboter + Staubentfernungssystem.
Schwere Güter (z. B. Tonnensäcke): Portalroboter in Betracht ziehen
Hohe Präzisionsanforderungen (z. B. Medikamentenboxen): mit hochauflösendem 3D-Vision-System.




