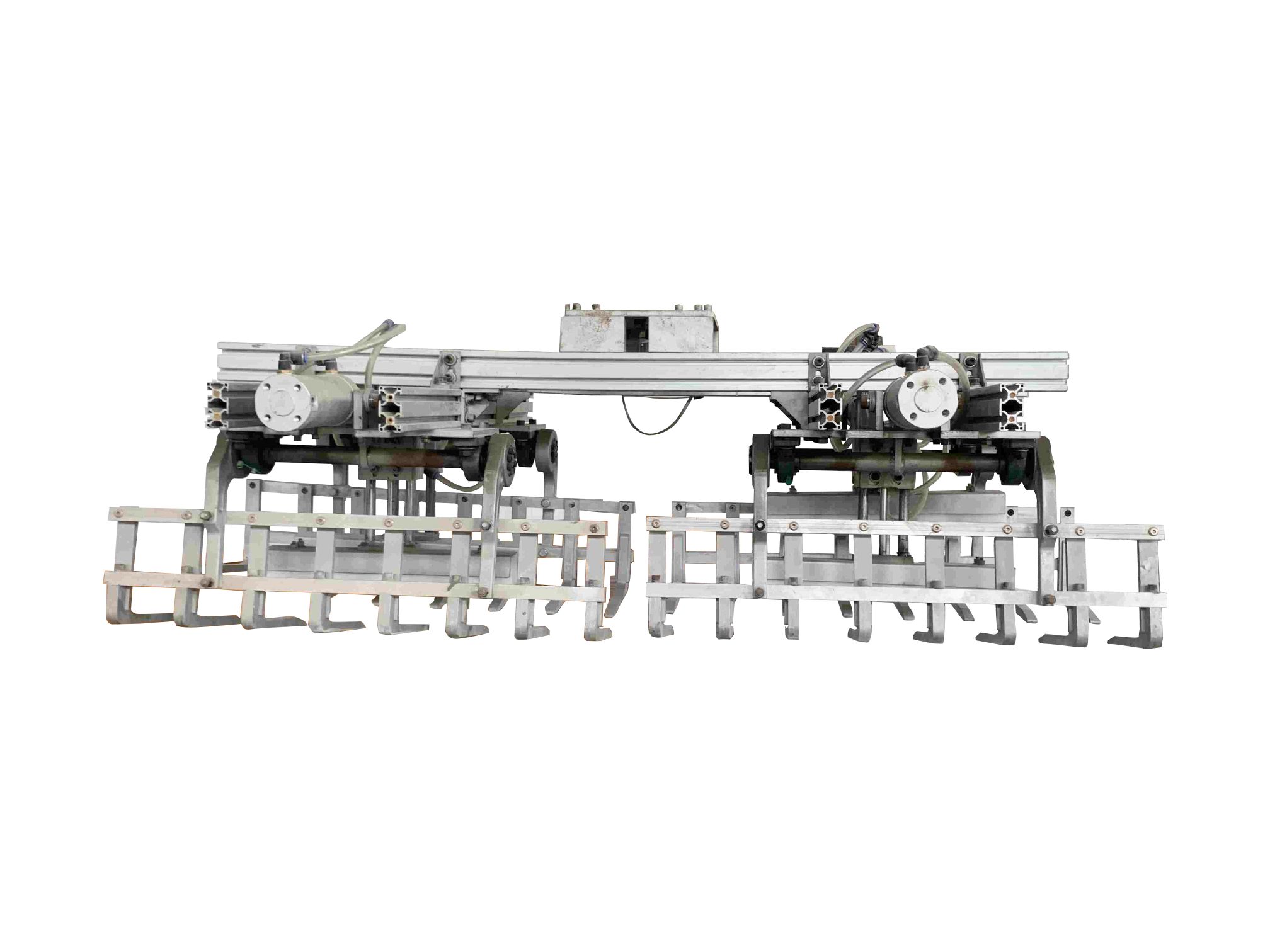




Palletisierungsroboter -Doppelklauen -Greifer
1. Mit dem Doppelkrallen -Design kann der Roboter zwei Elemente gleichzeitig schnappen oder Gegenstände aus verschiedenen Positionen schnappen, wodurch die Anzahl der Grabungen effektiv reduziert und so die Palettierungszeit verkürzt.
2. Die beiden Krallen sind normalerweise mit einem leistungsstärkeren Antriebssystem und strukturellen Design ausgestattet, um die Last zu zerstreuen und mehr Gewicht zu tragen.
3. Die beiden Krallen können sich unabhängig oder in Koordination bewegen und die Griffmethode an die Form und Größe der Waren flexibel einstellen.
4. Die Doppelkrallen können fein abgestimmt werden, um eine genauere Positionierung und Platzierung beim Platzieren von Waren auf Paletten oder festgelegten Stellen zu erreichen.
5. Die Doppelkrallen sind symmetrisch verteilt oder entworfen nach den Prinzipien der Mechanik, die beim Greifen von Waren besser aufrechterhalten werden können. Die Doppelkrallen können die unausgeglichene Kraft der Waren durch Anpassung der Stärke und Position ausgleichen.
Es besteht aus zwei unabhängigen Krallen, die zusammenarbeiten können. Die Krallen bestehen normalerweise aus hochfestem Aluminiumlegierung oder Edelstahl. Sie haben die Eigenschaften des Lichtgewichts, der hohen Festigkeit und des Korrosionsbeständigkeit und können sich an verschiedene harte Arbeitsumgebungen anpassen.
 Es ist mit dem Ende des Roboterarms des Palletisierungsroboters durch hochpräzise Gelenke, Lager und Übertragungsgeräte verbunden, um die Stabilität und Genauigkeit der Doppelkrallen während der Bewegung zu gewährleisten.
Es ist mit dem Ende des Roboterarms des Palletisierungsroboters durch hochpräzise Gelenke, Lager und Übertragungsgeräte verbunden, um die Stabilität und Genauigkeit der Doppelkrallen während der Bewegung zu gewährleisten.
 Der Drucksensor wird verwendet, um die Griffkraft der Krallen in Echtzeit zu überwachen, um zu verhindern, dass die Waren aufgrund einer unzureichenden Griffkraft durch übermäßige Griffkraft beschädigt werden. Der Positionssensor kann die Position und Haltung der Krallen genau federn.
Der Drucksensor wird verwendet, um die Griffkraft der Krallen in Echtzeit zu überwachen, um zu verhindern, dass die Waren aufgrund einer unzureichenden Griffkraft durch übermäßige Griffkraft beschädigt werden. Der Positionssensor kann die Position und Haltung der Krallen genau federn.

Verschiedene Greifermodi können nach Form, Größe und Gewicht der Waren flexibel geschaltet werden, z.
 Die Doppelkrallen können die Griffkraft und Position automatisch entsprechend der tatsächlichen Situation der Waren einstellen. Bei der Ergänzung leichterer Güter reduzieren die Krallen automatisch die packende Kraft, um Schäden an der Ware zu vermeiden.
Die Doppelkrallen können die Griffkraft und Position automatisch entsprechend der tatsächlichen Situation der Waren einstellen. Bei der Ergänzung leichterer Güter reduzieren die Krallen automatisch die packende Kraft, um Schäden an der Ware zu vermeiden.