

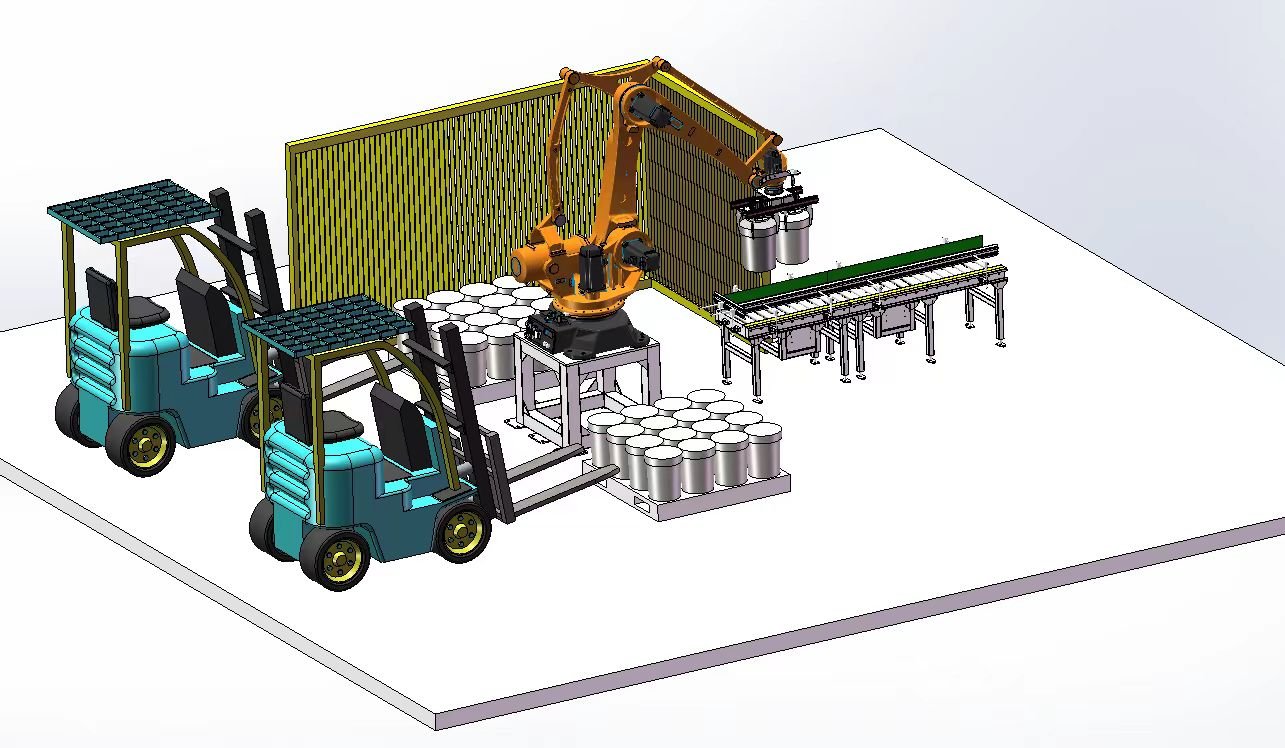



Automatischer Gelenkpalettierer
Die Mehrgelenkmaschine ähnelt dem menschlichen Arm und zeichnet sich durch ihre Flexibilität wie eine menschliche Hand aus. Trifft ein Mehrgelenkroboter beispielsweise auf ein Hindernis, kann er dieses umgehen und sein Ziel erreichen, was für herkömmliche Industrieroboter mit Polar- oder Zylinderkoordinaten schwierig ist. Auch spezielle Bewegungen (Kurbelbewegungen) lassen sich mit dem Mehrgelenkroboter einfacher ausführen. Ein Mehrgelenkroboter kann sich zudem in der gleichen Zeit wie eine menschliche Hand von einem Punkt zum anderen bewegen. Ausgestattet mit Tast- und Kraftsensoren in Händen und Handgelenken kann ein Mehrgelenkroboter komplexere Aufgaben erledigen.
Wenn sich ein Gelenk im Arm eines mehrgelenkigen Roboters um einen Winkel dreht, erzeugen die anderen Gelenke und ihre Verbindungsstangen eine Bewegung im Raum. Dementsprechend erreicht die Klaue eine neue Position und die Richtung (Lage) dieser Position ändert sich ebenfalls. Deshalb muss der mehrgelenkige Roboter im Allgemeinen computergesteuert sein. Der Roboter ist an jedem Gelenk mit Winkeldetektoren ausgestattet. Das Problem, bei dem man bei einem gegebenen Drehwinkel jedes Gelenks die räumliche Position und Lage der Handklaue erhält, wird als Analyseproblem der Bewegungssteuerung bezeichnet. Im Gegensatz dazu wird das Problem, bei gegebener Position und Lage der Handklaue, um welchen Winkel sich jede Gelenkverbindungsstange drehen muss, als Syntheseproblem der Bewegung bezeichnet. Der Schlüssel zu diesen Problemen liegt darin, wie man den Computer zur Durchführung der obigen Transformationen und Berechnungen einsetzt.








