





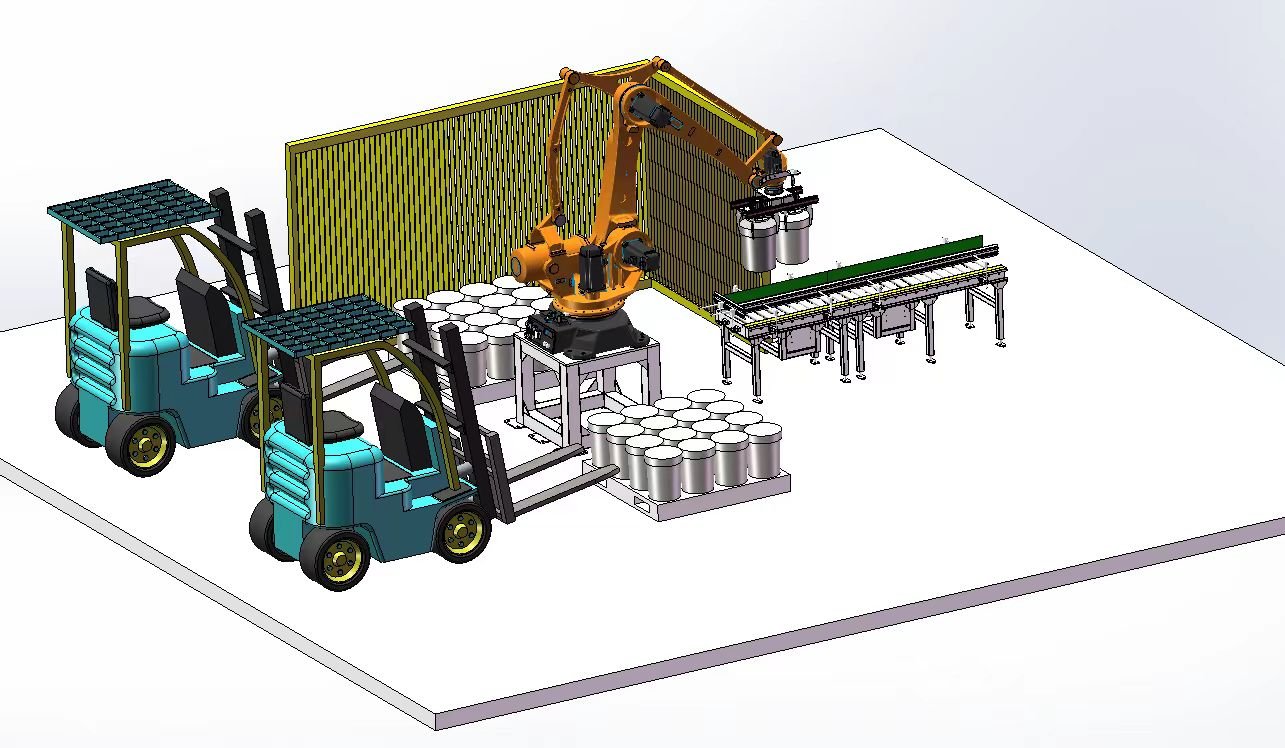



Automatischer Gelenkpalettierer
Die vielgelenkige Maschine ähnelt einem menschlichen Arm und zeichnet sich durch die Fähigkeit aus, sich wie eine menschliche Hand flexibel zu bewegen. Wenn der Mehrgelenkroboter beispielsweise auf ein Hindernis trifft, kann er das Hindernis umgehen, um das Ziel zu erreichen, was für den allgemeinen Industrieroboter vom Polar- oder Zylinderkoordinatentyp schwierig ist. Wenn einige spezielle Bewegungen (Kurbelbewegungen) ausgeführt werden müssen, ist der Mehrgelenkroboter auch einfacher auszuführen. Auch ein mehrgelenkiger Roboter kann sich in so kurzer Zeit wie eine menschliche Hand von einem Punkt zum anderen bewegen. Wenn ein Mehrgelenkroboter mit Tast- und Kraftsensoren in Händen und Handgelenken ausgestattet ist, kann er immer komplexere Arbeiten erledigen.
Wenn sich ein Gelenk im Arm eines Roboters mit mehreren Gelenken in einem Winkel dreht, erzeugen die anderen Gelenke und ihre Verbindungsstangen eine Bewegung im Raum. Dementsprechend erreicht die Klaue eine neue Position und die Richtung (Lage) der Position wird ebenfalls geändert. Daher muss der allgemeine Mehrgelenkroboter per Computer gesteuert werden. Der Roboter verfügt an jedem Gelenk über Winkeldetektoren. Angesichts des Drehwinkels jedes Gelenks wird das Problem der Ermittlung der räumlichen Position und Haltung der Handklaue als Analyseproblem der Bewegungssteuerung bezeichnet. Im Gegenteil, angesichts der Position und Haltung der Handklaue wird das Problem, um welchen Winkel sich jede Gelenkverbindungsstange drehen sollte, als Bewegungssyntheseproblem bezeichnet. Der Schlüssel zu diesen Problemen liegt darin, wie der Computer verwendet werden kann, um die obige Transformation und Berechnung durchzuführen.








